



Stanz-/Stapelroboter SDCX RMD-300/200/160/120/35/08/110/20/50
Technesch Parameteren
| Modell Nr. | Grad vun der Fräiheet | Fuermodus | Notzlaascht (kg) | Widderhuelungspositionéierungsgenauegkeet (mm) | Bewegungsradius (°) | Maximal Geschwindegkeet (°/s) | Zulässlech Trägheet vum Handgelenk (kg·m2) | Kreeslafschlag (Zyklus/Stonn) | Bewegungsradius (mm) | Lokalt Gewiicht (kg) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | AC Servo-Undriff | 300 | ±0,5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | AC Servo-Undriff | 200 | ±0,3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | AC Servo-Undriff | 160 | ±0,3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | AC Servo-Undriff | 120 | ±0,3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 1560③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | AC Servo-Undriff | 50 | ±0,2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 1700② | 2040 | 660 |
| SDCX-RMD20 | 4 | AC Servo-Undriff | 20 | ±0,08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0,51 | 1780① | 1720 | 256 |
| SDCX-RMD08 | 4 | AC Servo-Undriff | 8 | ±0,08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367,5 | 0,25 | 1800① | 1433 | 180 |
Bemierkungen:
① D'Testbunn ass 150 mm héich an 1000 mm breet, an déi tatsächlech Zykluszäit gëtt vun den tatsächlechen Aarbechtsbedingungen beaflosst;
② D'Testbunn ass 200 mm héich an 1000 mm breet, an déi tatsächlech Zykluszäit gëtt vun den tatsächlechen Aarbechtsbedingungen beaflosst;
③ D'Testbunn ass 400 mm héich an 2000 mm breet, an déi tatsächlech Zykluszäit gëtt vun den tatsächlechen Aarbechtsbedingungen beaflosst;
Kontakt mat brennbare, explosiven a korrosiven Gasen a Flëssegkeeten vermeiden; Net mat Waasser, Ueleg a Stëbs sprëtzen; Vun elektresche Geräischquellen (Plasma) ewech halen
Bewegungsradius
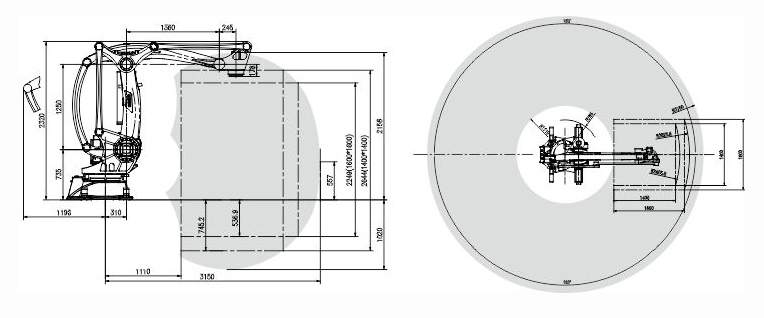
Bewegungsdiagrammberäich fir SDCX-RMD300/200/160/120
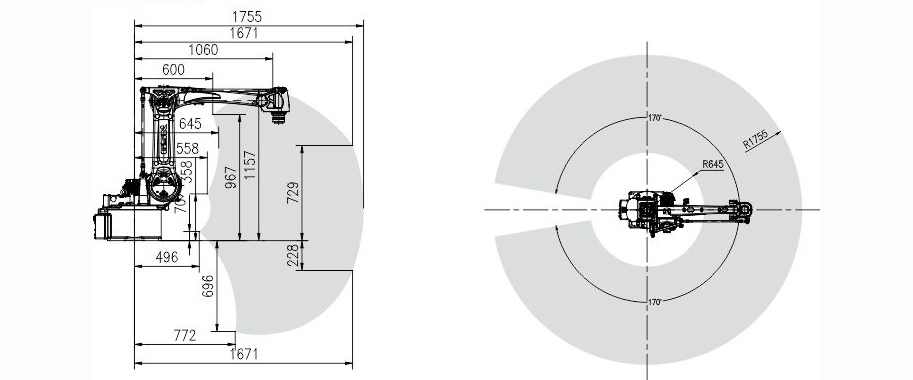
Bewegungsdiagrammberäich fir SDCX-RMD20
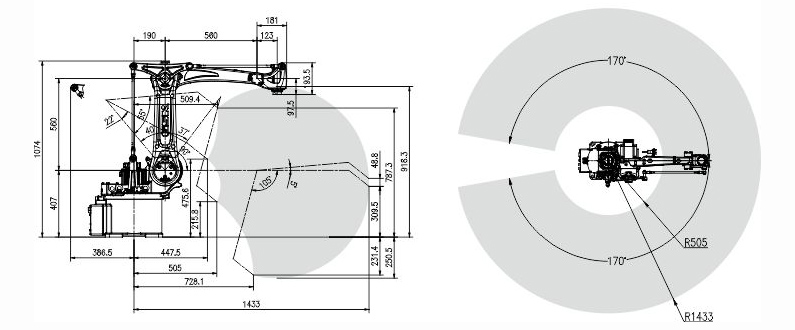
Bewegungsdiagrammberäich fir SDCX-RMD08
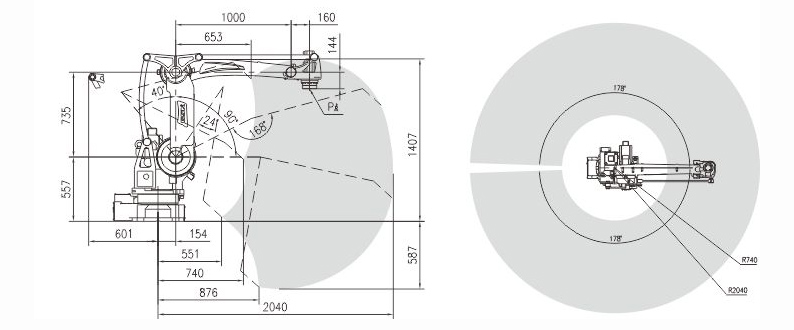
Bewegungsdiagrammberäich fir SDCX-RMD50
Produktapplikatioun Display
Léisungen
Technescht Schema vum Projet fir d'Handhabung vu Stolcoils












